Robotics, Automation & Mechatronics Engineering Laboratory

2025
CONGRATULATIONS!

2025
Robotics, Automation & Mechatronics Engineering Laboratory

2024
Robotics, Automation & Mechatronics Engineering Laboratory

2023
Robotics, Automation & Mechatronics Engineering Laboratory

2022
CONGRATULATIONS!

2022
THE NEW LABORATORY!

The Robotics, Automation & Mechatronics Engineering Laboratory (RAMEL) at Escuela Superior Politécnica del Litoral (ESPOL) is a facility for graduate and undergraduate robotics research and education with an emphasis on studying novel mechatronics design. Our research interests are in the area of Robot and Manipulator design, Unmanned Systems, soft robotics, machine learning, and planning and controlling robots.
Robots Design
Bipedal, Quadruped, or any Social and Educational Robots
Soft Robotics
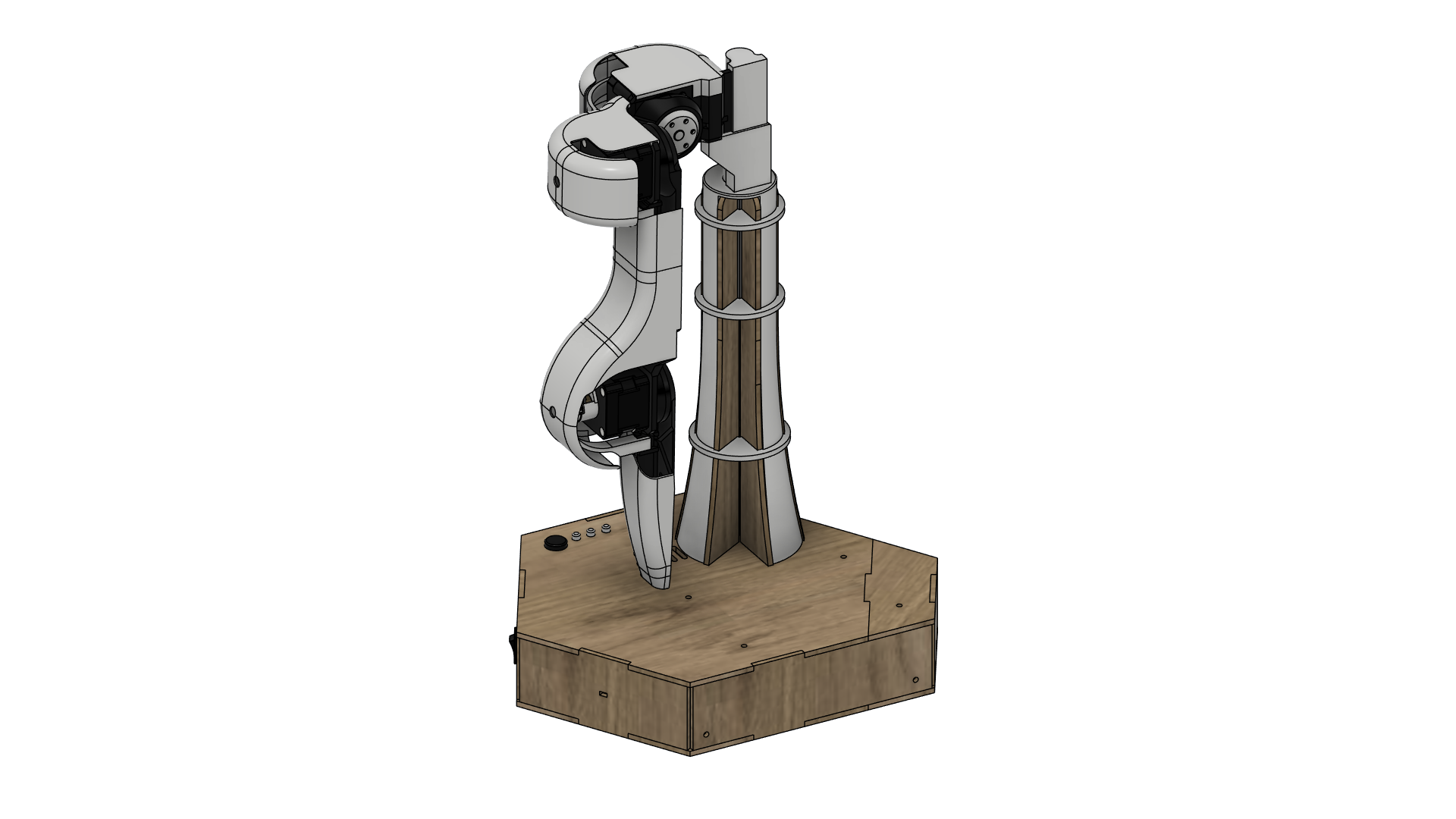
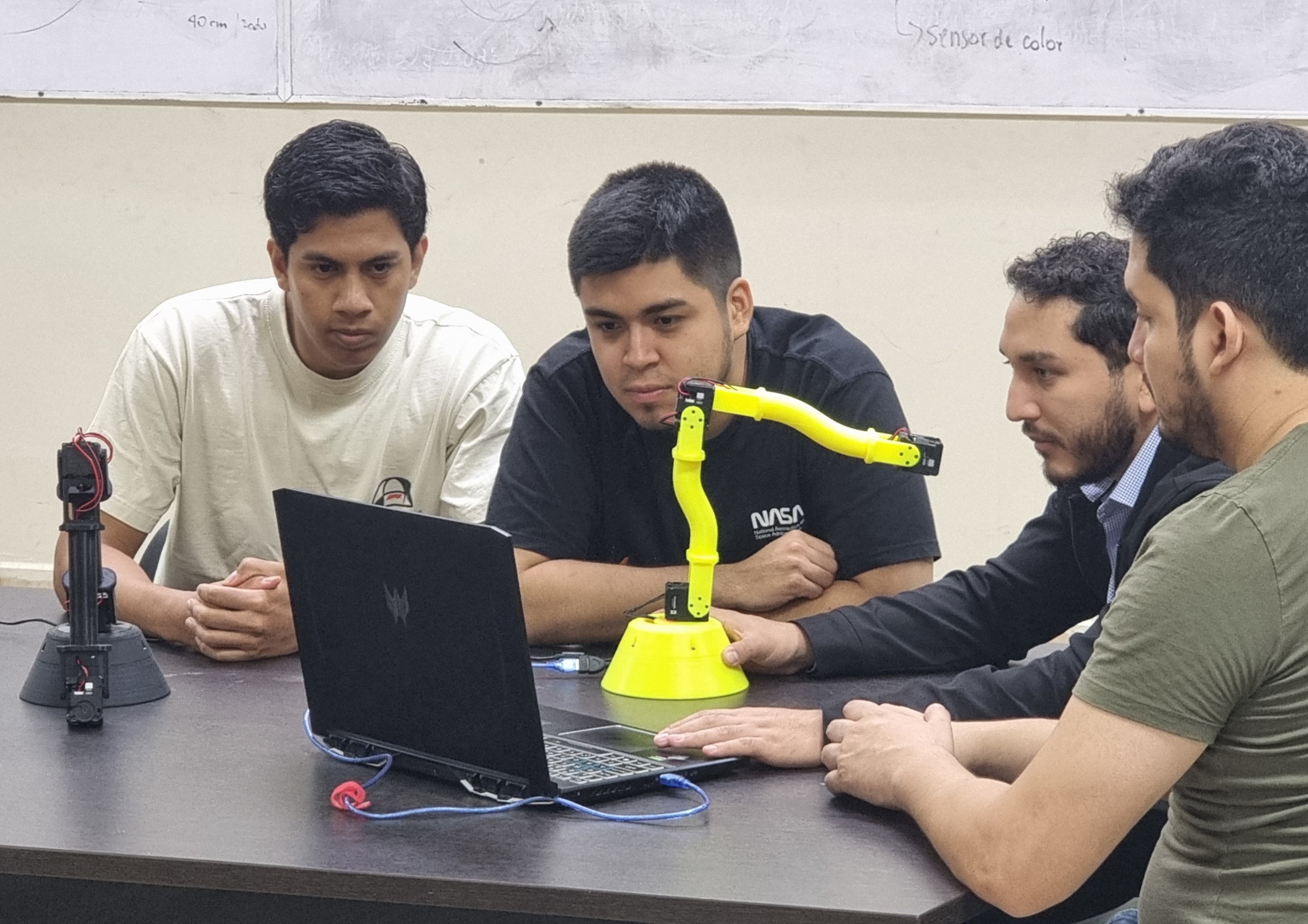
Robotic Manipulators
Manipulator designs, Tactile Sensors, Robot Hand, and Soft Manipulators
Unmanned Systems
Drones (UAV), Cars (UGV)
Autonomous Navigation
Robot Vision
Artificial Intelligence
Machine and Reinforcement Learning
Research

Rehabilitation Robotics
Robotic Manipulators

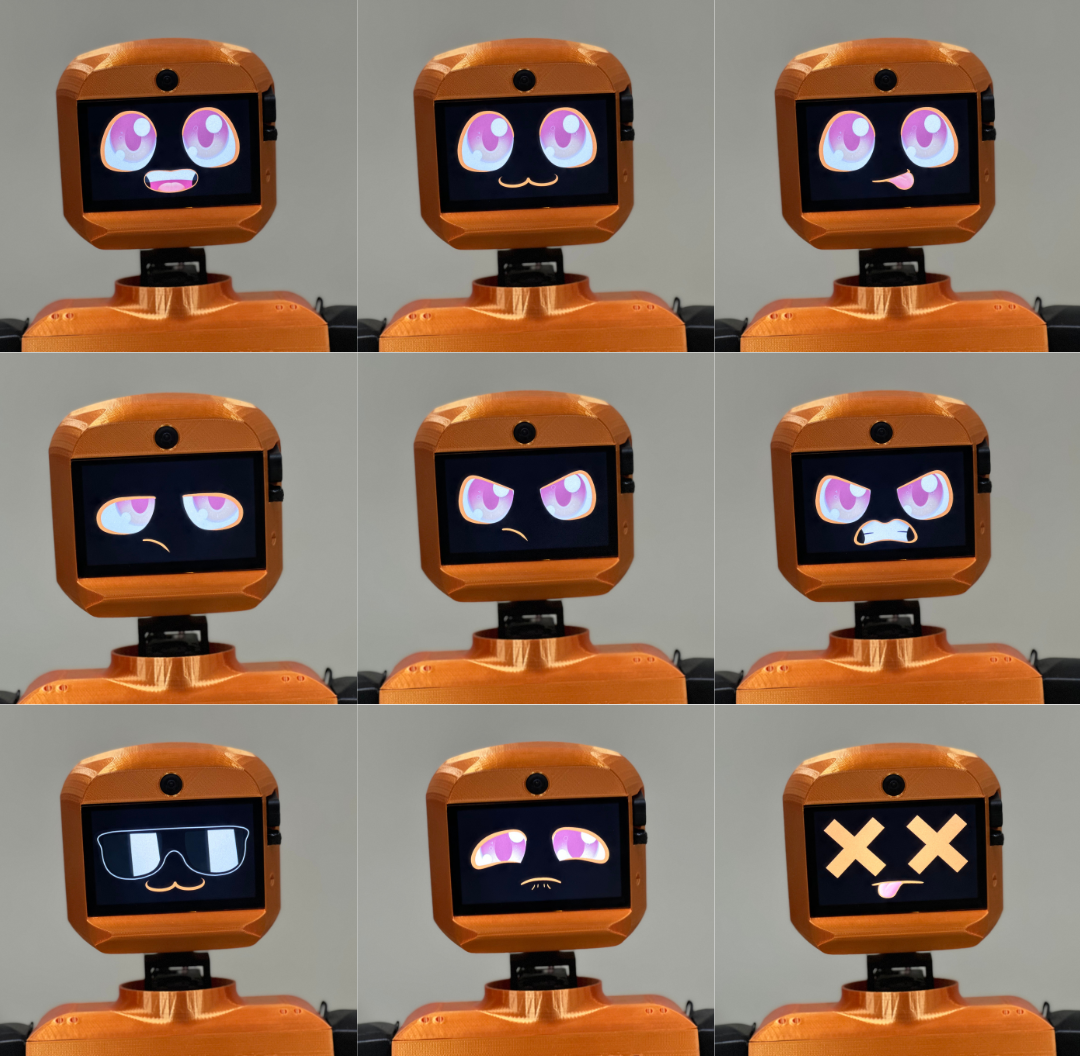
Autism Spectrum
Robots Design

STEAM ROBOTS
Robots Design

TherapyBuddy
Robot Design

Industrial Robots
Unmanned Systems

Autonomous Robot
Unmanned Systems

Quadruped
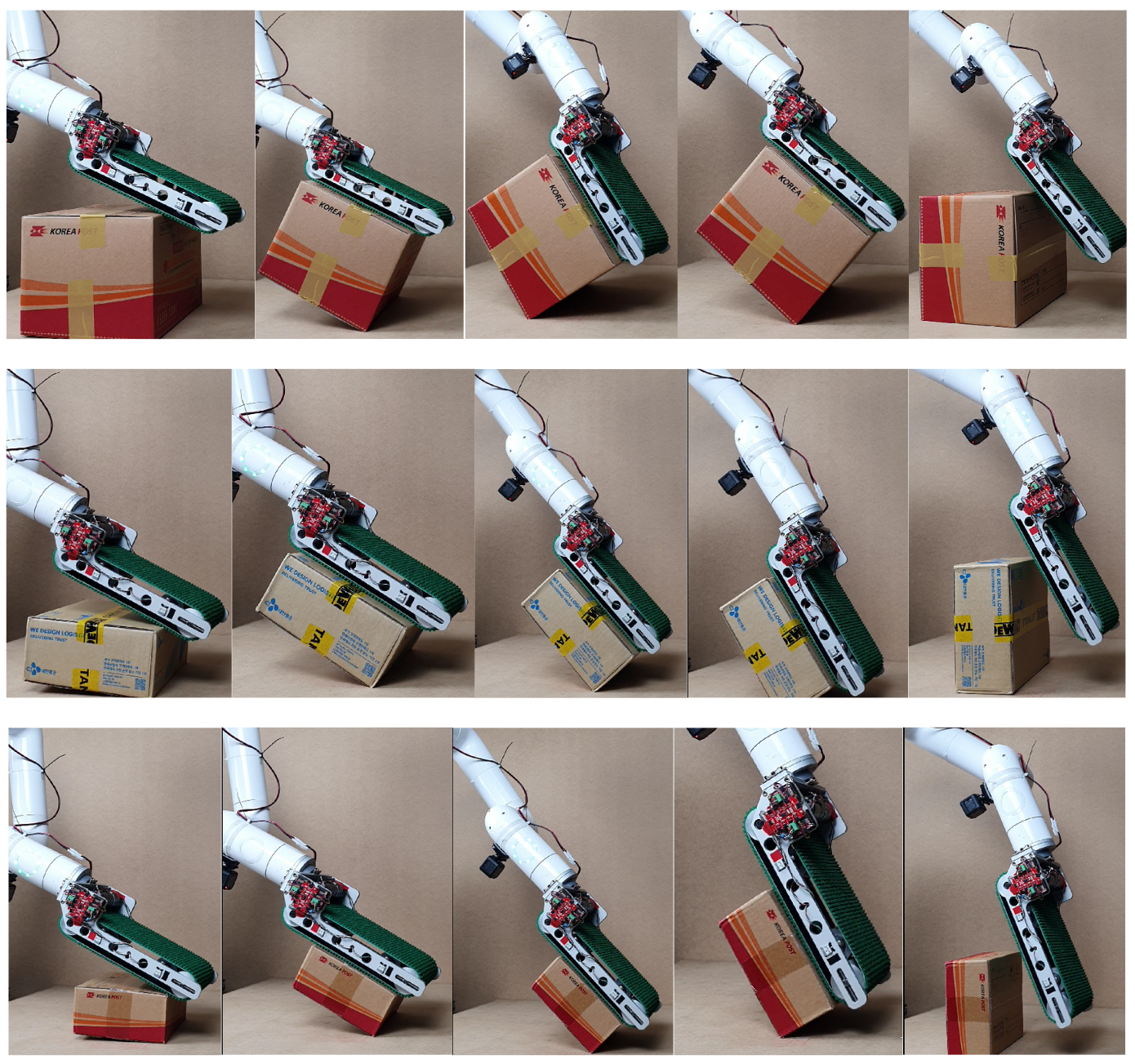
Robot Design

Package
Robotic Manipulators
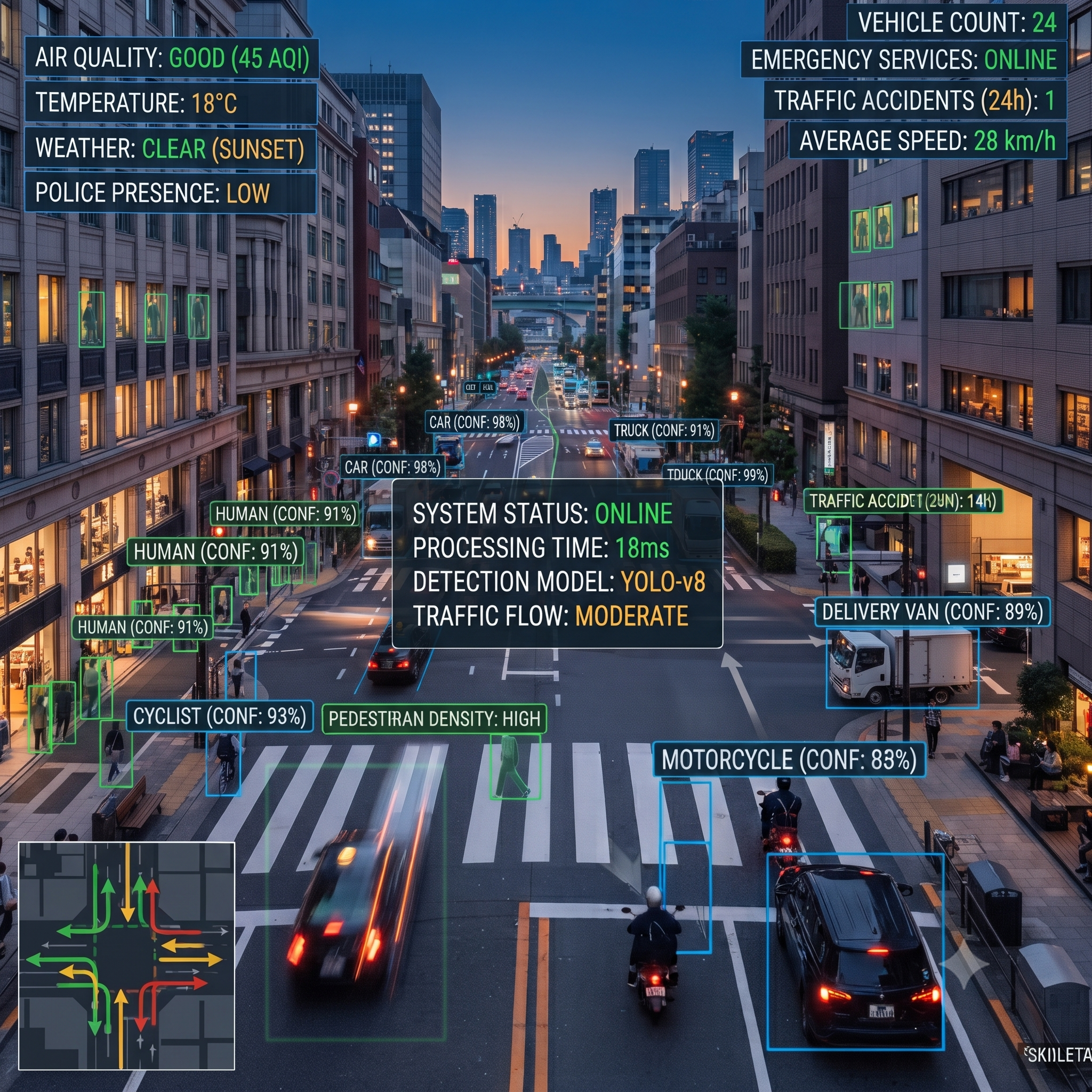
Computer Vision
Artificial Intelligence

OobSoft Gripper
Robotic Manipulators
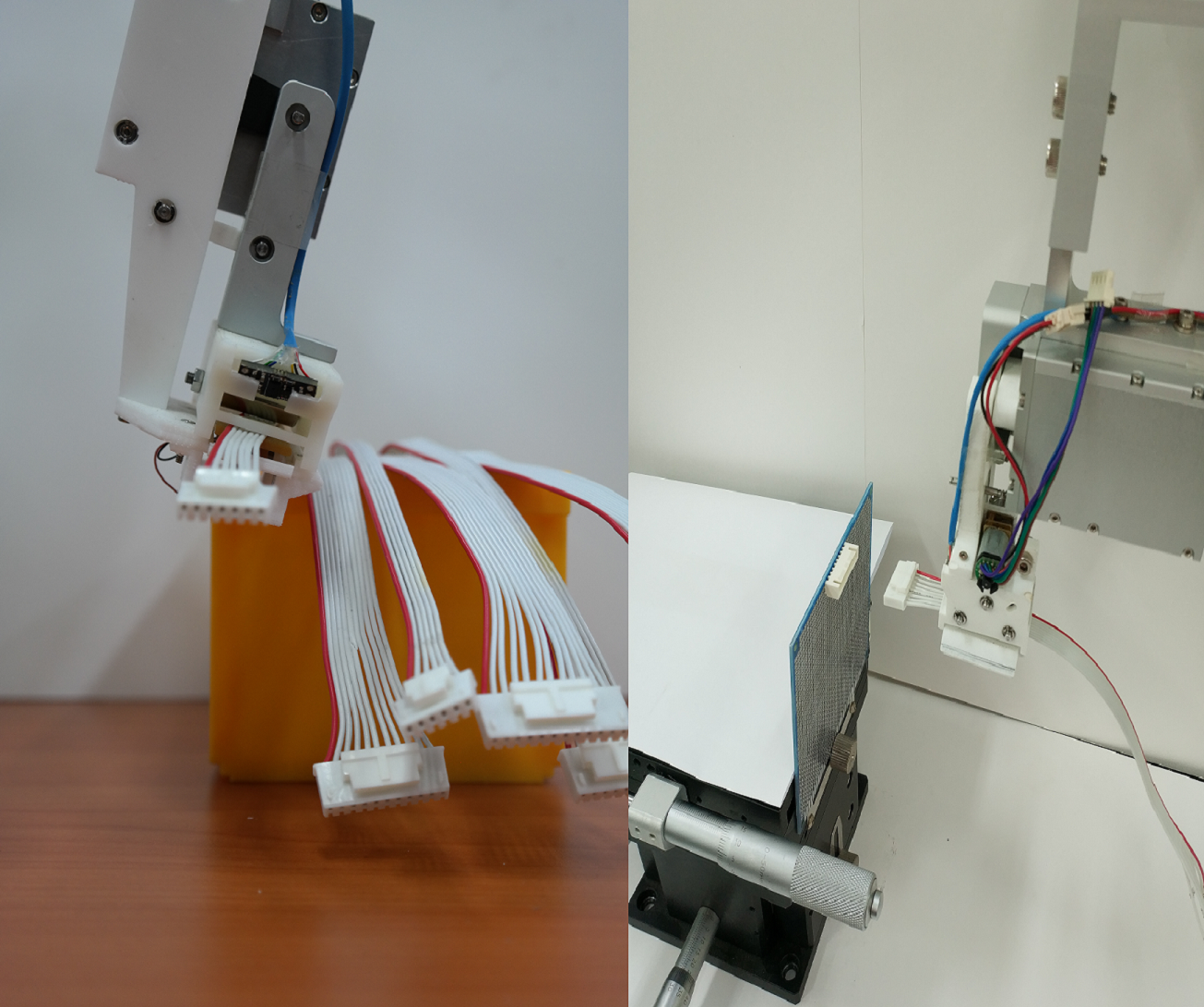
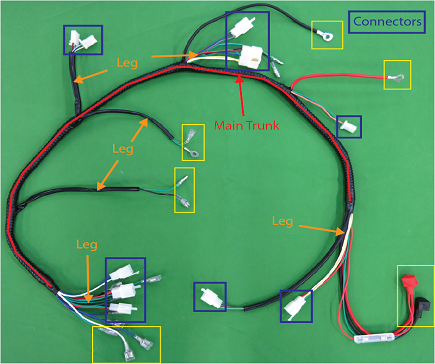
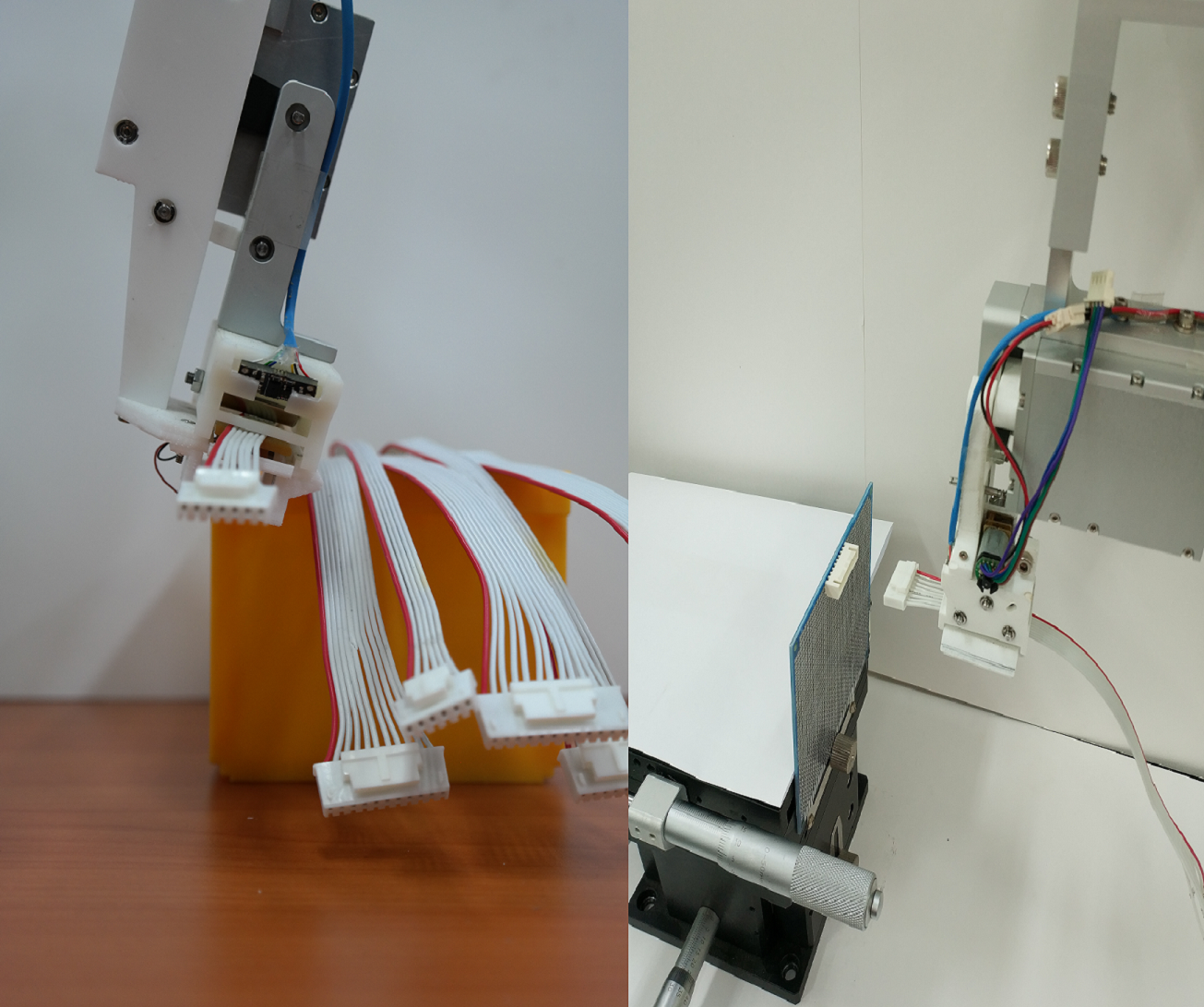
Cable Manipulator
Robotic Manipulators
Head of the Laboratory

Francisco Yumbla
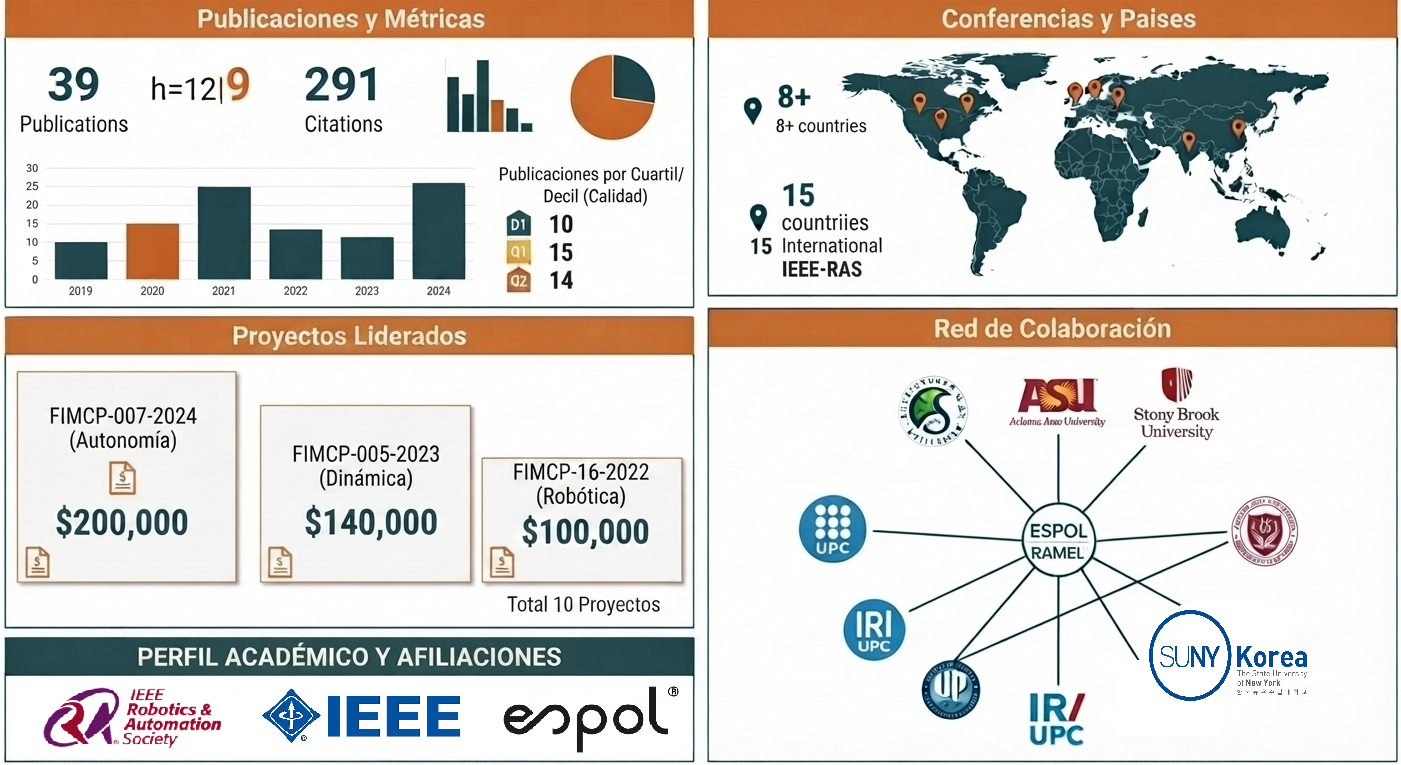
FRANCISCO YUMBLA (Senior Member, IEEE) received his degree in Electrical Engineering with a specialization in Electronics and Industrial Automation from Escuela Politécnica del Litoral (ESPOL), Guayaquil, Ecuador, in 2014. He obtained his Ph.D. in Mechanical Engineering in the field of Robotics and Mechatronics from Sungkyunkwan University (SKKU), South Korea, in 2021. He was a Postdoctoral Researcher at the Robotics Engineering Research Center at Sungkyunkwan University. In 2022, he joined the Faculty of Mechanical Engineering and Production Sciences at ESPOL as a Research Professor, and since 2025 he has been a Full Professor in the Mechatronics program. Since 2023, he has served as Director of the Robotics, Automation & Mechatronics Engineering Laboratory (RAMEL). He has published more than 30 scientific papers and has participated as a speaker in 15 international IEEE-RAS conferences, including ICCRA, IROS, CASE, UR, ICARA, ICMRE, and ICCAS. He is also the director and principal investigator of research projects funded by both national and international organizations. His research interests include autonomous vehicles, social robotics, robotic arm manipulation, robot and manipulator design, as well as artificial intelligence.
PROFESSORS

Marcelo Fajardo Pruna

Jorge Hurel

Jonathan Leon
Researchers

Renzo Fernandez
Research Assistant

Gerardo Pozo
Research Assistant

Austin Estrella
Research Assistant

Jhony Choez
Research Assistant

Newton Toledo
Computer Vision

Eliezer Acebo
Robots Design

Ivan Baldeon
Research Assistant

Jean Thomé
Robots Programmer

Daniel Pallazhco
Unmanned Systems

Jorge Pluas
Unmanned Systems

Bryan Briones
Unmanned Systems

Arturo Carrera
Research Assistant

Emilio Riofrio
Research Assistant

Patricio Vasquez
Research Assistant

Roberto Estrada
Research Assistant

Juan Espinoza
Research Assistant

Domenica Santamaria
Research Assistant

Kruger Ronquillo
Computer Vision

Melissa Barberán
Robots Design

Cristian Orozco
Robots Design
ALUMNI

Yandri Uchuari
2022II

Rhandall Valdez
2022II

Jose Morán
2022II
Hugo Aviles
2022II

Juan Sanchez
2022II

Sofía España
2022II

Anthonny Piguave
2023I

Luis Andrade
2023I

Javier Pagalo
2023I

Cristobal Lara
2023I

Diego Ronquillo
2023I

José Landívar
2023II

César Quintuña
2024I

Iesus Dávila
2024I

Luis Arroba
2024I

Favia Elizalde
2024I

Jorge Zapata
2024I

Sergio Balcázar
2024I
César Aulestia
2024II

Carlos González
2024II

Martín Mendoza
2024II

Julio Dender
2024II

Juan Saeteros
2024II

Erick Mendoza
2024II

Camila Reyes
2024II

Isaac León
2024II

Daniel Mejía
2025I

Joel Veloz
2025II

Pablo Lara
2025II
Contact Us
Recruiting for students researcher is open for researchers who want to work in our research areas. Don't hesitate to get in touch with Prof. Francisco Yumbla for inquiries by e-mail or at his office (RAMEL).
Phone/E-mail
+593-4-2269350
fryumbla@espol.edu.ec
Office
Facultad de Ingeniería Mecánica y Ciencias de la Producción.
Campus "Gustavo Galindo" Km. 30.5 Vía Perimetral